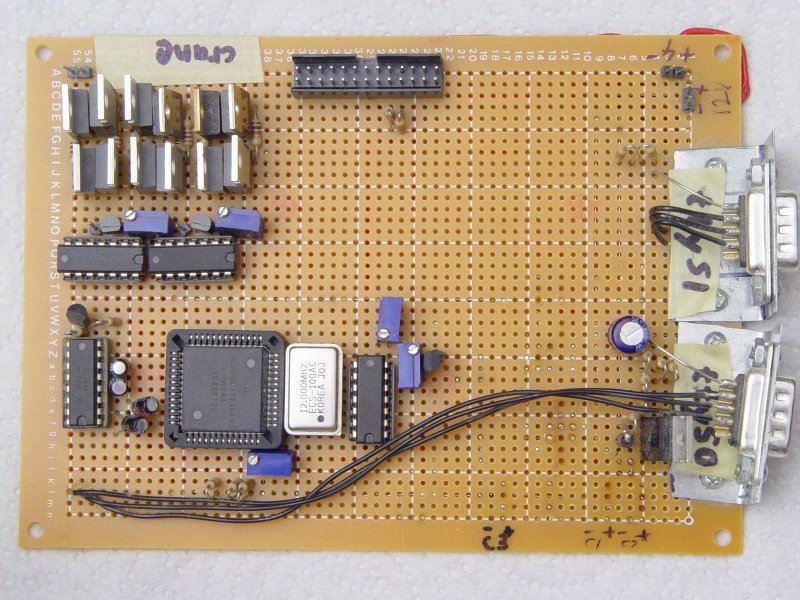
The main board contains 1 Motorola 68HC11E1 MCU for controlling the crane. This was our first and last 68HC11 project since newer PIC 18F microcontrollers are much more powerful.
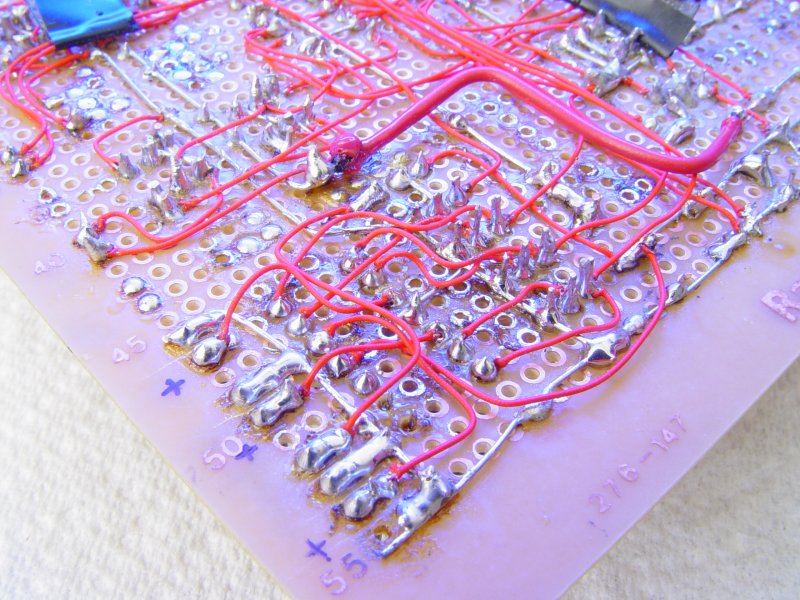
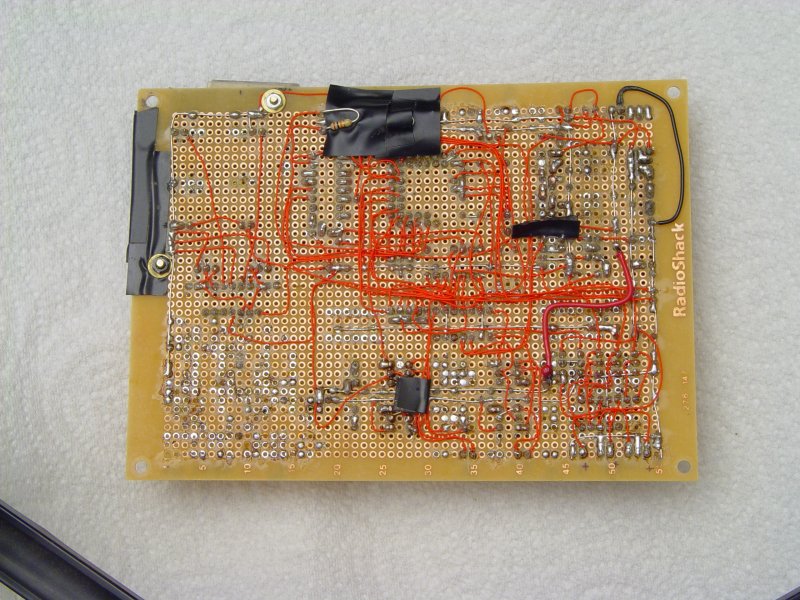
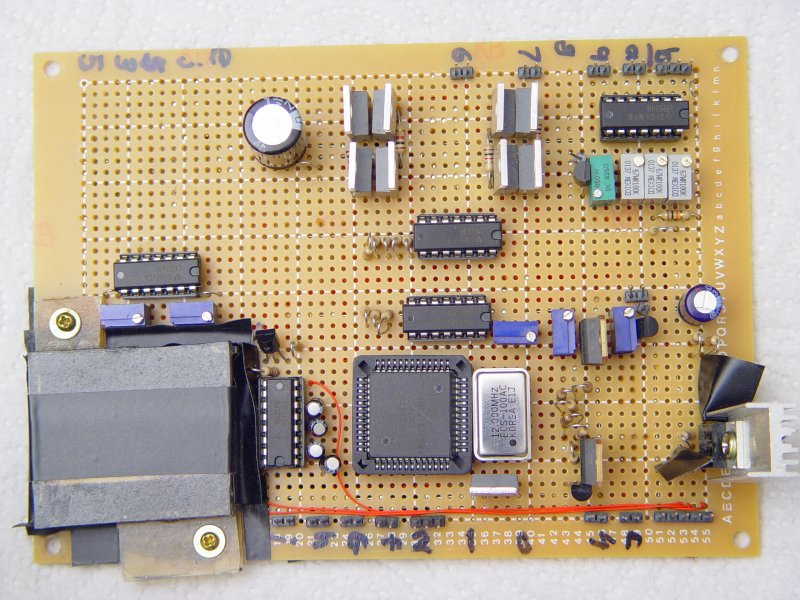
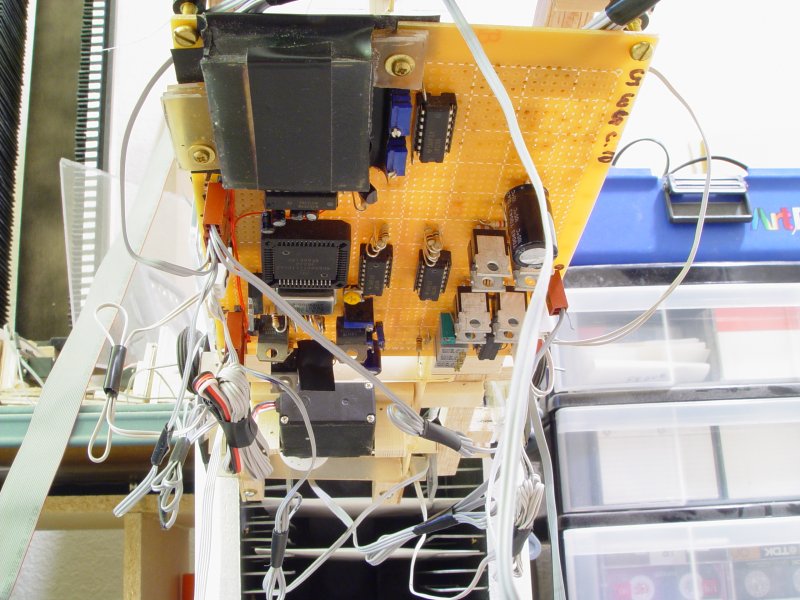
The sled board contains a second MCU for controlling the sled. Point to point soldering is all we could afford. The point to point soldering in these boards is a modern marvel.
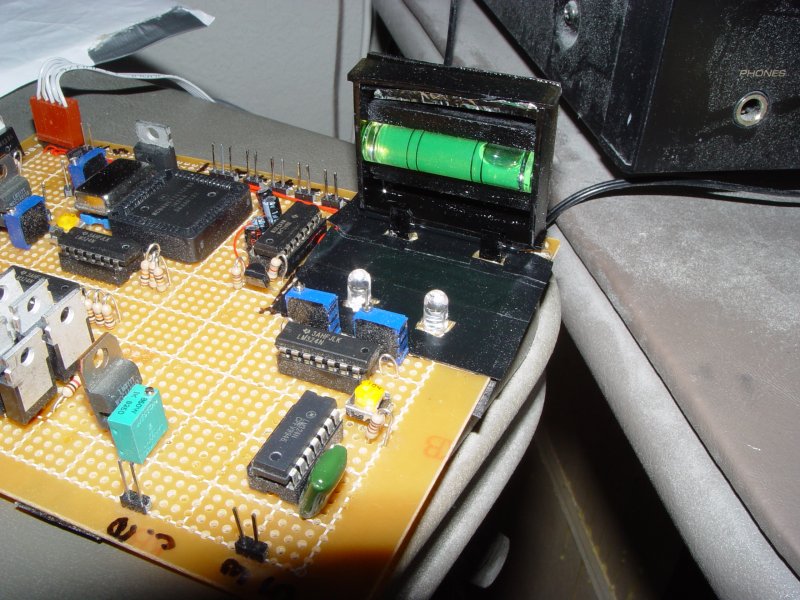
Inside the black box is a balance sensor. Without constant balance readings and adjustments by computer, the sled would tilt and crash into the tower. Being before the age of IC accelerometers, all we had was a bubble level and 2 IR cutoff sensors. The liquid balance sensor has worked well enough that there hasn't been a need to upgrade it.

This is the analog data from the vertical sensors during a sled movement. The middle sensor is on top and the side sensor is on the bottom. You can clearly see where the black sleaves and express boundaries appear in the middle sensor. The rows clearly show up in the side sensor. Unfortunately, this isn't enough for a computer.


The analog data is converted to a derivative, since computers detect changes much more easily than they detect absolute values. For the middle sensor, the computer calculates a threshold derivative based on the average sleave reflection and express boundary reflection. For the side sensor, the threshold is hard coded.