
The tachometer and servo turn the corkscrew at a constant RPM. The servo has been stripped of its feedback potentiometer and rotation stopper and its motor soldered directly to our H bridge.

Unlike most servo hackers who continue to drive the servo through its own H bridge, we found a brand new H bridge connected directly to the servo motor can provide more power and is easier to program. Although this servo originally ran on 5V, the trapezoid runs it on 9V. Incidentally this servo was bought in 1988.
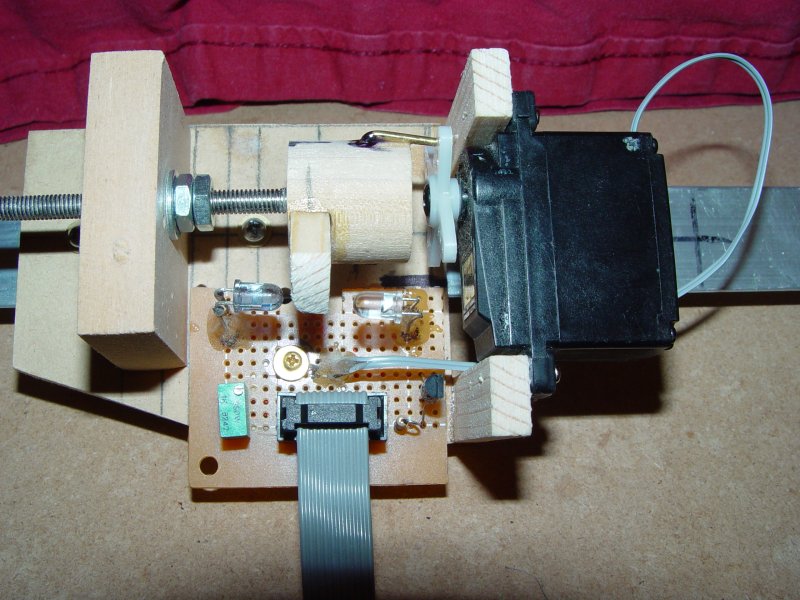
The tachometer is simply a piece of wood which interrupts an IR cutoff sensor. Many other solutions were tried mainly back-EMF and voltage ripple. Back-EMF didn't work at such a low RPM with very little intertia. Voltage ripple could give an RPM of the servo but it required a digital potentiometer to control servo power and it lacked enough wiper positions to get accurate enough speeds.
Lacking enough money for an enclosure, the photodiode pins had to be spaced 1/4" apart to prevent condensation and that eliminated the use of op-amps for the very weak photodiode signal. A custom preamp had to be built with the wide pin spacing, directly on the drive.
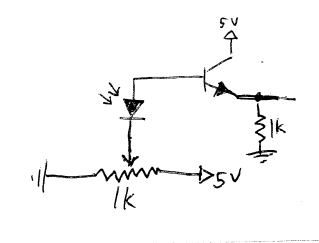
The theory is the photodiode is reverse biased enough so any rise in voltage due to the photodiode gets a huge current boost from the transistor.
The camera platform must be as isolated as humanly possible from the servo vibration. That meant the drive train had to go on a support structure and connect by a very long cable.

The corkscrew pulls the fishing line.
A number of things minimize the periodic error of this drive train. The corkscrew is a heavy 10-32 rod to resist bending due to the lateral servo force.
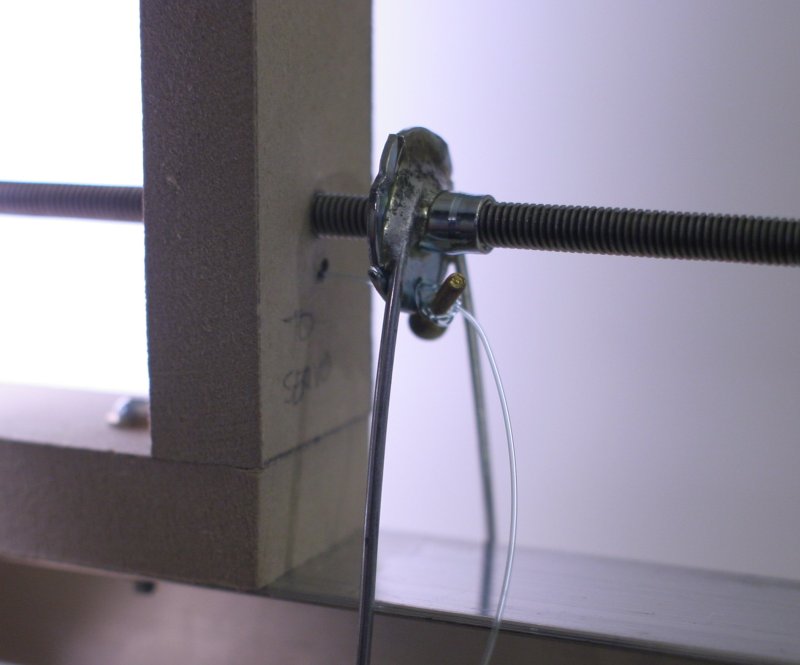
The fishing line attaches as close as possible to the corkscrew to minimize longitudinal deflection due to corkscrew bending.
The fishing line pulls on the right ascention arm. Because the fishing line pulls in a straight line you'd think the angular velocity would change, but as long as the deflection is under 15° and the least amount of fishing line hangs out under the right ascention support, the angular velocity is practically constant.

(C) 1997-2024 Starving, flat broke, usually unemployed Programmers
Hosted all these years by Sourceforge